Active Research Topics

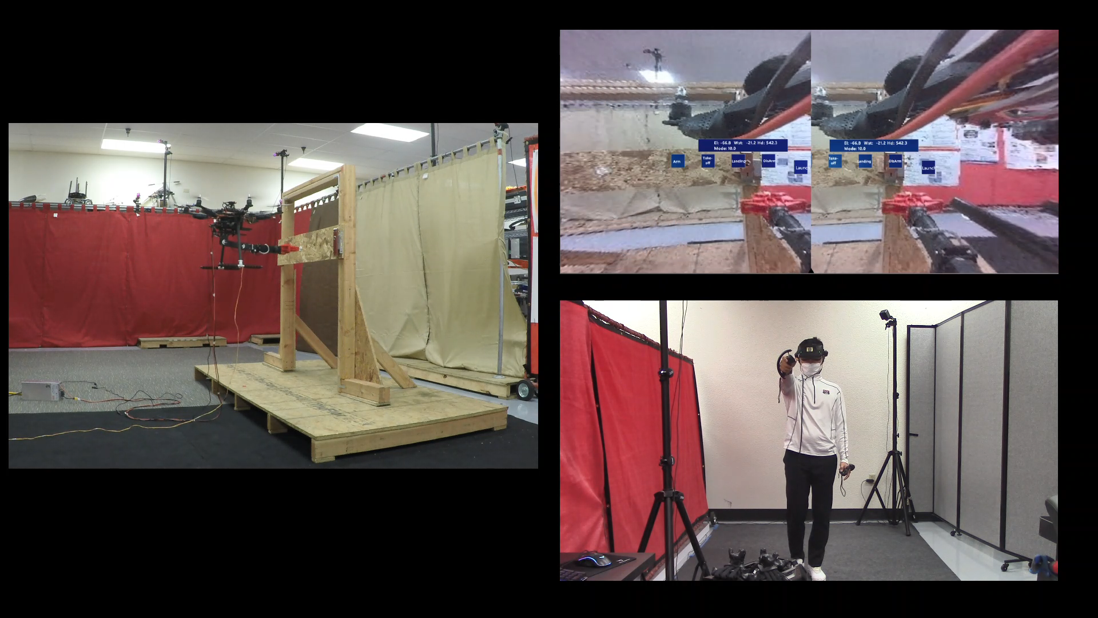
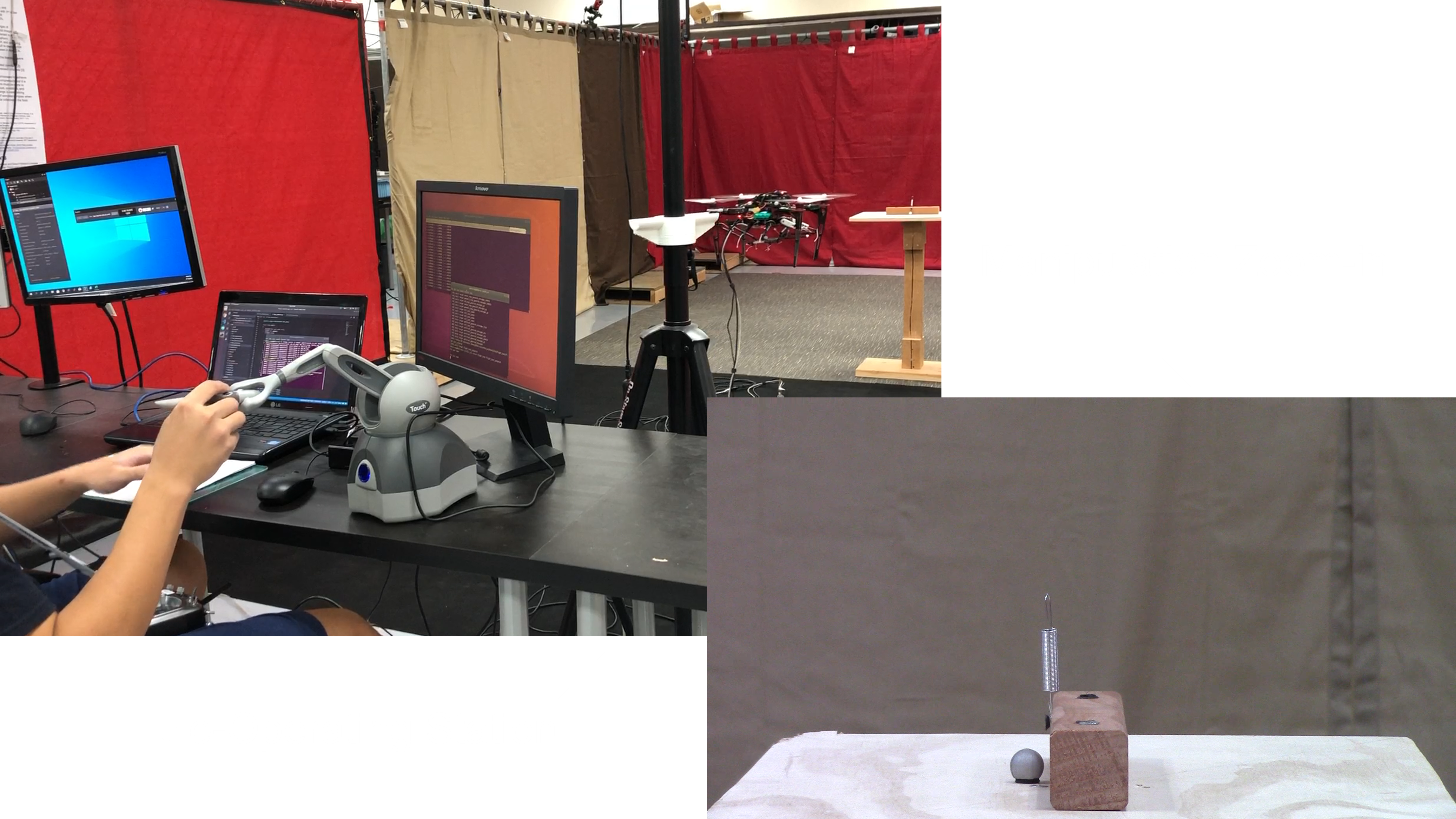
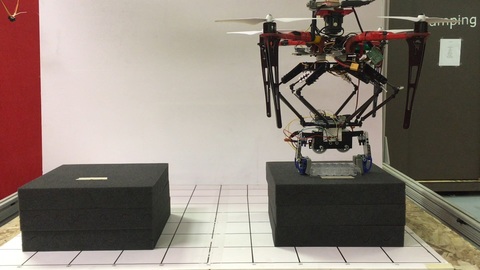
Aerial Manipulation
Exploring advanced drones with robot arms or tools, enabling them to perform complex tasks in challenging or hazardous environments.

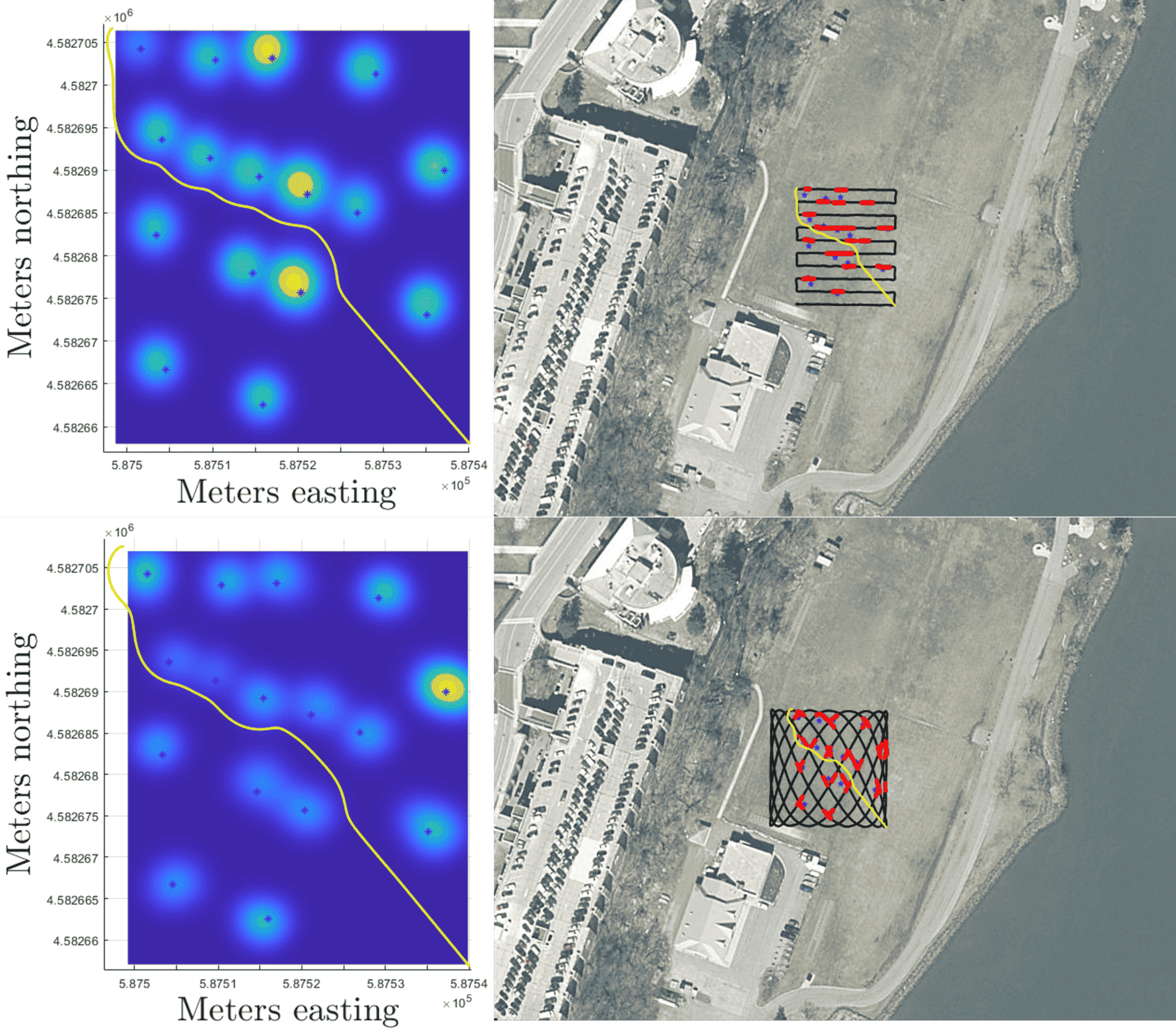
Robot Swarm
Developing collaborative multi-robot systems to tackle large-scale missions from search-and-rescue operations to distributed data gathering and exploration.

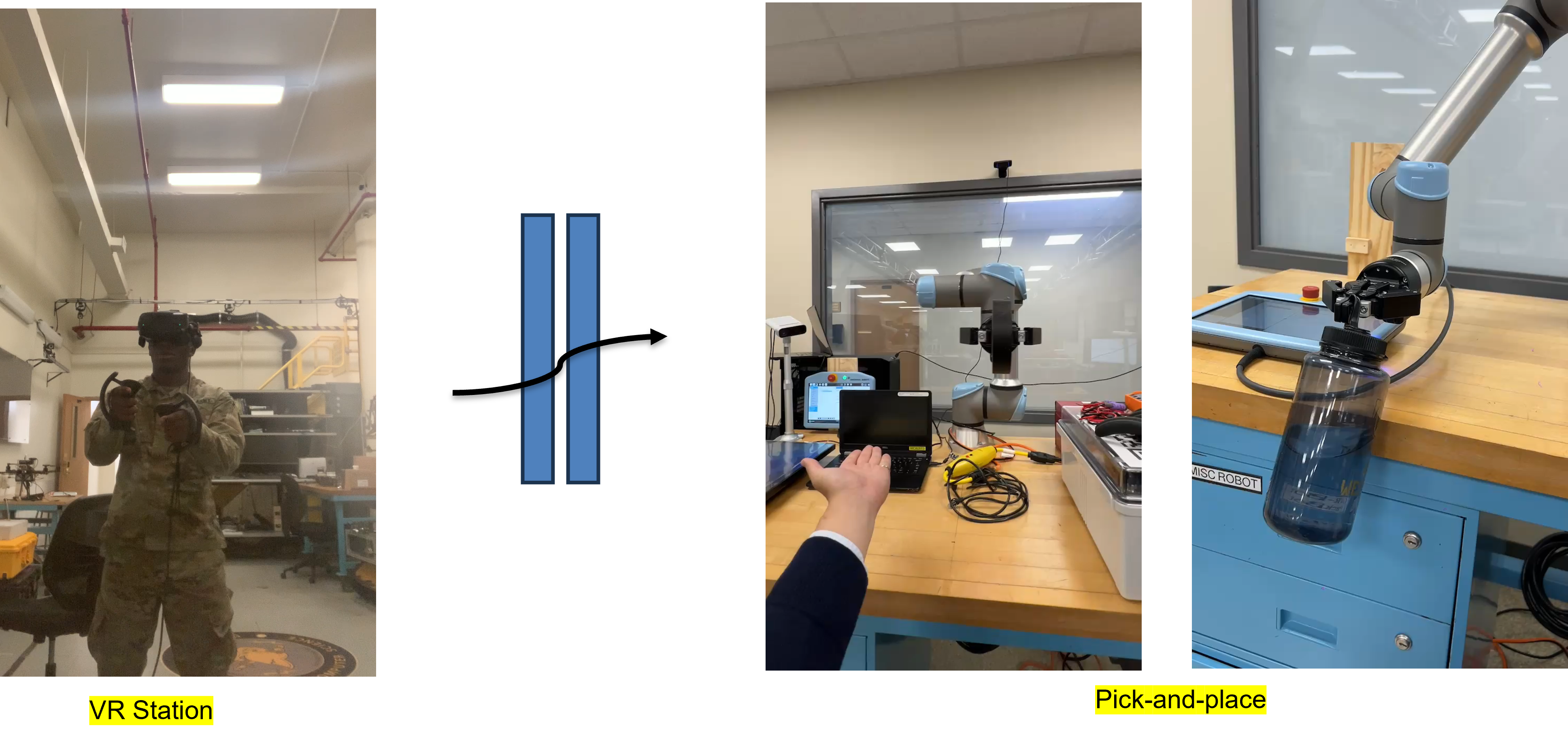
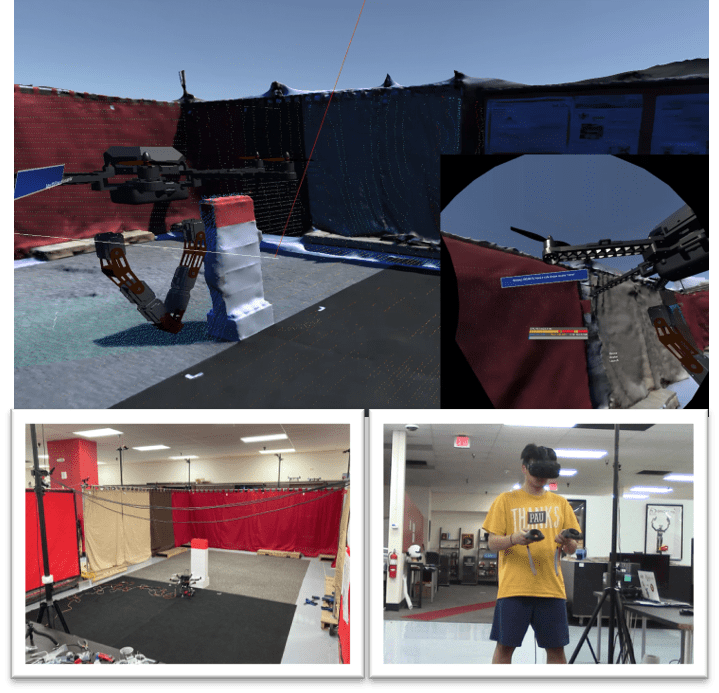
Human-Embodied Robots Through Mixed Reality
Bridging the gap between humans and robots via immersive AR/VR, empowering intuitive remote teleoperation and real-time human-in-the-loop control.

Robot Learning by Demonstration using AI
Combining AI with demonstration-based teaching to help robots rapidly acquire new tasks and adapt to dynamic environments.